T=2;
alpha=0.8; % 加权衰减因子
window=1/(1-alpha); % 检测机动的有效窗口长度
dt=100; % dt=dt_x=dt_y=100
Th=25; % 机动检测门限
Ta=9.49; % 退出机动的检测门限
N=800/T; % 采样次数
M=50; % 模拟次数
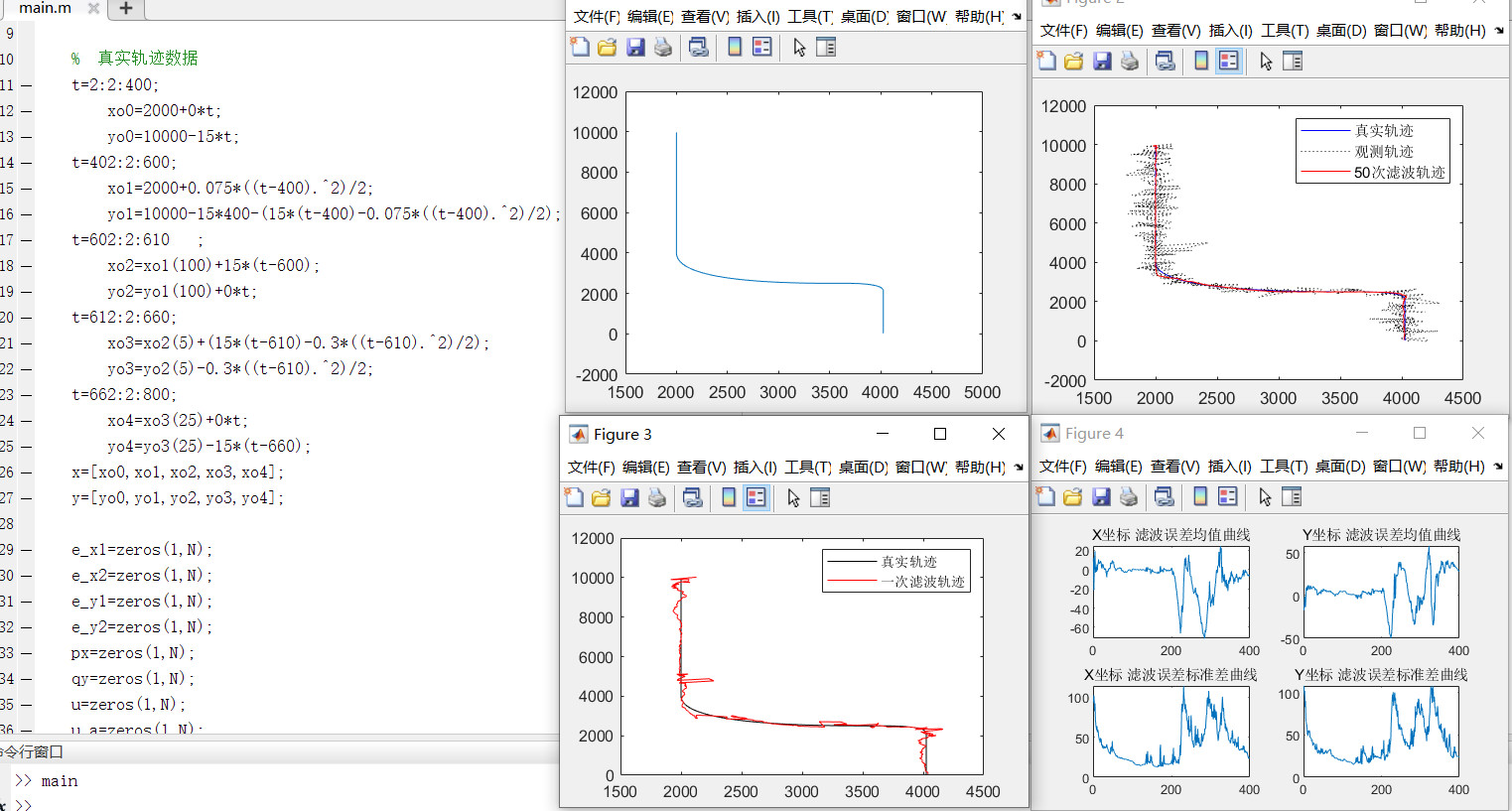
% 真实轨迹数据
t=2:2:400;
xo0=2000+0*t;
yo0=10000-15*t;
t=402:2:600;
xo1=2000+0.075*((t-400).^2)/2;
yo1=10000-15*400-(15*(t-400)-0.075*((t-400).^2)/2);
t=602:2:610 ;
xo2=xo1(100)+15*(t-600);
yo2=yo1(100)+0*t;
t=612:2:660;
xo3=xo2(5)+(15*(t-610)-0.3*((t-610).^2)/2);
yo3=yo2(5)-0.3*((t-610).^2)/2;
t=662:2:800;
xo4=xo3(25)+0*t;
yo4=yo3(25)-15*(t-660);
x=[xo0,xo1,xo2,xo3,xo4];
y=[yo0,yo1,yo2,yo3,yo4];
e_x1=zeros(1,N);
e_x2=zeros(1,N);
e_y1=zeros(1,N);
e_y2=zeros(1,N);
px=zeros(1,N);
qy=zeros(1,N);
u=zeros(1,N);
u_a=zeros(1,N);
for j=1:M
no1=100*randn(1,N); % 随机白噪
no2=100*randn(1,N);
for i=1:N;
zx(i)=x(i)+no1(i); % 观测数据
zy(i)=y(i)+no2(i);
z(:,i)=[zx(i);zy(i)];
end
提取码:bgkh
© 著作权归作者所有
极寒钛
别给思维设限