clear,clc
% compute the background image
Imzero = zeros(240,360,3);
% video=aviread('SampleVideo.avi');
% Im = double(cat(4,video(1:2:end).cdata))/255;
video=VideoReader('SampleVideo.avi');
Im = double(cat(4,read(video(1:2:end))))/255;
clear video
% Convert to RGB to GRAY SCALE image.
nFrames = size(Im,4);
for i = 1:5
%Im{i} = double(imread(['DATA/',int2str(i),'.jpg']));
Imzero = Im(:,:,:,i)+Imzero;
end
Imback = Imzero/5*255;
[MR,MC,Dim] = size(Imback);
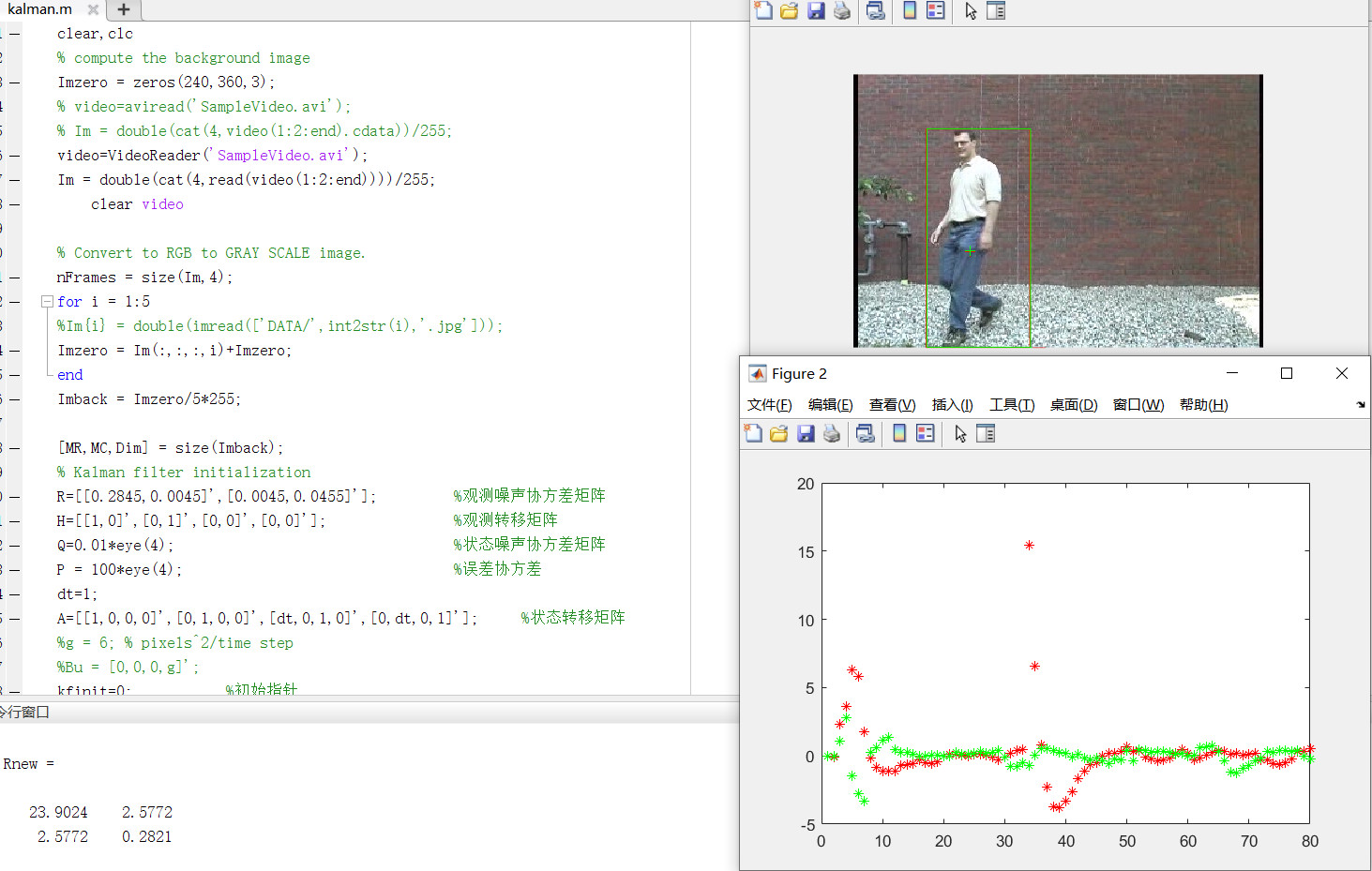
% Kalman filter initialization
R=[[0.2845,0.0045]',[0.0045,0.0455]']; %观测噪声协方差矩阵
H=[[1,0]',[0,1]',[0,0]',[0,0]']; %观测转移矩阵
Q=0.01*eye(4); %状态噪声协方差矩阵
P = 100*eye(4); %误差协方差
dt=1;
A=[[1,0,0,0]',[0,1,0,0]',[dt,0,1,0]',[0,dt,0,1]']; %状态转移矩阵
%g = 6; % pixels^2/time step
%Bu = [0,0,0,g]';
kfinit=0; %初始指针
x=zeros(100,4); %状态矩阵
提取码:oz4p
© 著作权归作者所有
极寒钛
别给思维设限